 时间:2026-03-11
时间:2026-03-11  来源:
来源:
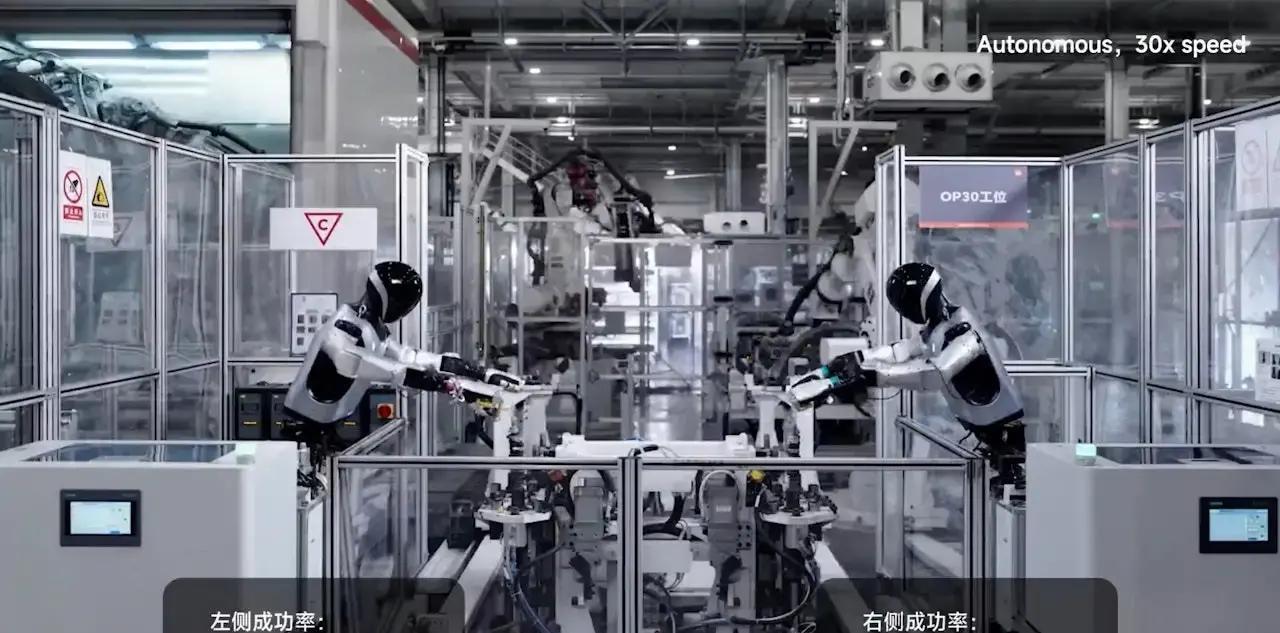
2026年3月,小米汽车工厂的一次产线测试引发业内讨论。一台人形机器人在整车制造车间连续工作3小时,参与拧螺丝等装配环节,整体完成度达到90%以上。与舞台展示不同,这次测试直接卡着产线76秒的真实节拍——机器人必须在这固定时间内,一口气完成多个动作环节。
而过去几年,人形机器人多出现在演示场景,而生产流水线关心的是设备能否进入稳定运行阶段。当机器人开始参与产线任务,工程问题也随之变得更现实——温度、震动、节拍一致性以及系统同步,都会影响设备长期稳定运行。
在这样的系统环境中,很多看似不起眼的基础器件,反而成为维持设备节奏的重要因素。
实验室与工厂之间的工程鸿沟
大众关注人形机器人,往往聚焦于行走、交互、舞台表演等可视化能力;但在工厂量产场景中,工程团队的核心考核维度完全不同。实验室环境中,单次动作顺利完成即可通过测试;但在量产产线上,同一套动作需要重复数万至数百万次,环境温变、机械共振、长期运行老化、工业现场 EMI 电磁干扰,都会持续放大系统的不稳定因素。
实验室验证看的是单次峰值表现,量产落地要的是全生命周期的稳定性。对产线设备而言,“能动” 只是入门门槛,长周期无故障运行的鲁棒性,才是真正的产业化核心考题。

机器人系统中的时间节拍
在机器人控制系统中,大量动作都依赖严格的时间节拍。机械臂关节运动需要固定周期控制循环;电机驱动依赖稳定PWM信号;视觉系统需要稳定图像采样频率;工业通信系统则依赖统一系统时钟。一旦节拍出现漂移,设备动作就可能产生延迟或抖动。
因此,在许多工业机器人控制板设计中,系统主频通常设定在 72MHz左右,用于维持控制循环节奏。
在硬件架构中,工程团队往往会使用有源晶振作为主时钟源。例如一些工业机械臂控制系统会采用 2520封装、3.3V供电的72MHz OSC晶振,为控制系统提供稳定频率基准。
从控制板到算力模块的时钟需求
随着机器人系统不断升级,视觉识别与计算模块逐渐加入整机架构。图像识别、路径规划以及多模态感知需要更高的数据处理能力,相应地也需要稳定度更高的时钟源。
在部分机器人算力板卡ODM项目中,工程团队会采用 7050封装6Pin TCXO(100MHz,3.3V CMOS,±30ppm),为计算模块提供更稳定的时钟信号。这些器件体积小,却承担着整机系统节拍的重要角色。
当设备长期运行在真实工厂环境中,时钟系统还需要面对温度变化、机械震动以及长时间运行带来的影响。一旦时钟源出现漂移,控制系统节拍就可能被打乱。

基础器件在系统中的位置
在复杂设备体系中,一些基础元器件往往决定系统长期运行表现。工程项目在晶振选型阶段,通常会评估多个因素,例如:批次一致性,温度变化下的频率稳定度,与工业设备周期匹配的器件寿命,长期稳定的供应能力。
晶振的长期稳定性,直接决定了它能否被纳入工业整机的核心供应链体系。也正是基于对工业级晶振核心性能与供应能力的双重认可,越来越多的机器人控制系统、AI 算力板卡厂商,已将SJK 晶科鑫等国产头部晶振企业,纳入自己的核心供应链名录。
从机械臂控制板到机器人计算模块,稳定的时钟器件正在支撑整机系统运行。当行业讨论机器人发展时,人们常常把目光放在算法、大模型和算力上。
但在真实生产系统中,工程团队更关心另一件事:设备能否持续运行数千小时甚至更长时间。
当机器人逐渐进入工厂环境,系统同步与控制节拍这些基础工程问题,也变得愈发重要。
在机器人时代,时间本身,也是一项需要被认真对待的工程参数。如果说算法决定了机器人的上限,那么对时间这一基础参数的掌控,就决定了系统的下限。









 你了解高精度SMD 7050 TCXO吗?
你了解高精度SMD 7050 TCXO吗?

